The e57::Data3D is a structure that stores the top-level information for a single lidar scan. More...
#include <E57Simple.h>
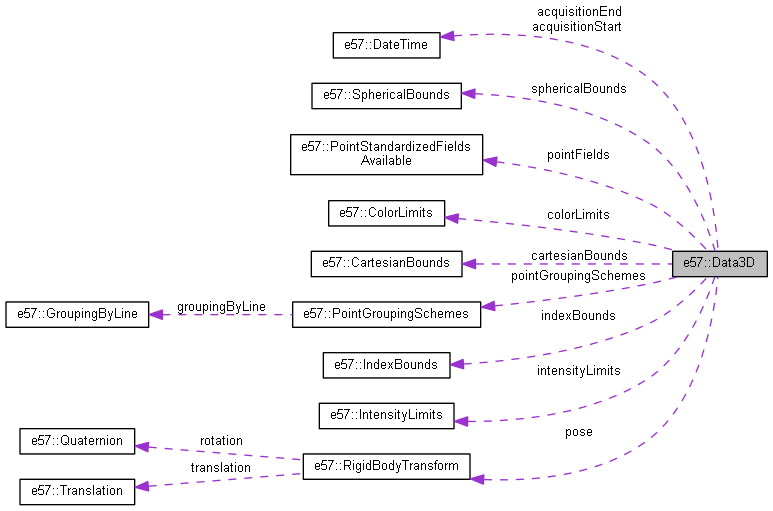
Collaboration diagram for e57::Data3D:
Public Member Functions | |
| Data3D (void) | |
| This function is the constructor for the Data3D class. | |
| ~Data3D (void) | |
| This function is the destructor for the Data3D class. | |
| void | Reset (void) |
| This function clears all the data members of the Data3D class. | |
Public Attributes | |
| ustring | name |
| A user-defined name for the Data3D. | |
| ustring | guid |
| A globally unique identification string for the current version of the Data3D object. | |
| std::vector< ustring > | originalGuids |
| A vector of globally unique identification Strings from which the points in this Data3D originated. | |
| ustring | description |
| A user-defined description of the Image. | |
| ustring | sensorVendor |
| The name of the manufacturer for the sensor used to collect the points in this Data3D. | |
| ustring | sensorModel |
| The model name or number for the sensor. | |
| ustring | sensorSerialNumber |
| The serial number for the sensor. | |
| ustring | sensorHardwareVersion |
| The version number for the sensor hardware at the time of data collection. | |
| ustring | sensorSoftwareVersion |
| The version number for the software used for the data collection. | |
| ustring | sensorFirmwareVersion |
| The version number for the firmware installed in the sensor at the time of data collection. | |
| float | temperature |
| The ambient temperature, measured at the sensor, at the time of data collection (in degrees Celsius). Shall be ? ?273.15� (absolute zero). | |
| float | relativeHumidity |
| The percentage relative humidity, measured at the sensor, at the time of data collection. Shall be in the interval [0, 100]. | |
| float | atmosphericPressure |
| The atmospheric pressure, measured at the sensor, at the time of data collection (in Pascals). Shall be positive. | |
| e57::DateTime | acquisitionStart |
| The start date and time that the data was acquired. | |
| e57::DateTime | acquisitionEnd |
| The end date and time that the data was acquired. | |
| e57::RigidBodyTransform | pose |
| A rigid body transform that describes the coordinate frame of the 3D imaging system origin in the file-level coordinate system. | |
| e57::IndexBounds | indexBounds |
| The bounds of the row, column, and return number of all the points in this Data3D. | |
| e57::CartesianBounds | cartesianBounds |
| The bounding region (in cartesian coordinates) of all the points in this Data3D (in the local coordinate system of the points). | |
| e57::SphericalBounds | sphericalBounds |
| The bounding region (in spherical coordinates) of all the points in this Data3D (in the local coordinate system of the points). | |
| e57::IntensityLimits | intensityLimits |
| The limits for the value of signal intensity that the sensor is capable of producing. | |
| e57::ColorLimits | colorLimits |
| The limits for the value of red, green, and blue color that the sensor is capable of producing. | |
| e57::PointGroupingSchemes | pointGroupingSchemes |
| The defined schemes that group points in different ways. | |
| e57::PointStandardizedFieldsAvailable | pointFields |
| This defines the active fields used in the WritePoints function. | |
| int64_t | pointsSize |
| Total size of the compressed vector of PointRecord structures referring to the binary data that actually stores the point data. | |
Detailed Description
The e57::Data3D is a structure that stores the top-level information for a single lidar scan.
The documentation for this class was generated from the following files:
- C:/Projects/E57Doxygen/E57Simple.h
- C:/Projects/E57Doxygen/E57Simple.cpp
