The e57::Image2D is a structure that stores an image from a camera. More...
#include <E57Simple.h>
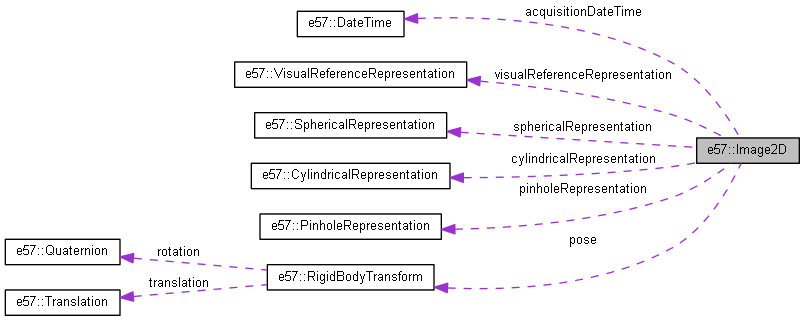
Collaboration diagram for e57::Image2D:
Public Member Functions | |
| Image2D (void) | |
| This function is the constructor for the Image2D class. | |
| ~Image2D (void) | |
| This function is the destructor for the Image2D class. | |
| void | Reset (void) |
| This function clears all the data members of the Image2D class. | |
Public Attributes | |
| ustring | name |
| A user-defined name for the Image2D. | |
| ustring | guid |
| A globally unique identification string for the current version of the Image2D object. | |
| ustring | description |
| A user-defined description of the Image2D. | |
| e57::DateTime | acquisitionDateTime |
| The date and time that the image was taken. | |
| ustring | associatedData3DGuid |
| The globally unique identification string (guid element) for the Data3D that was being acquired when the picture was taken. | |
| ustring | sensorVendor |
| The name of the manufacturer for the sensor used to collect the points in this Data3D. | |
| ustring | sensorModel |
| The model name or number for the sensor. | |
| ustring | sensorSerialNumber |
| The serial number for the sensor. | |
| e57::RigidBodyTransform | pose |
| A rigid body transform that describes the coordinate frame of the camera in the file-level coordinate system. | |
| e57::VisualReferenceRepresentation | visualReferenceRepresentation |
| Representation for an image that does not define any camera projection model. The image is to be used for visual reference only. | |
| e57::PinholeRepresentation | pinholeRepresentation |
| Representation for an image using the pinhole camera projection model. | |
| e57::SphericalRepresentation | sphericalRepresentation |
| Representation for an image using the spherical camera projection model. | |
| e57::CylindricalRepresentation | cylindricalRepresentation |
| Representation for an image using the cylindrical camera projection model. | |
Detailed Description
The e57::Image2D is a structure that stores an image from a camera.
The documentation for this class was generated from the following files:
- C:/Projects/E57Doxygen/E57Simple.h
- C:/Projects/E57Doxygen/E57Simple.cpp
